

PeriaateruuviaskelmoottoriRuuvia ja mutteria käytetään kytkeytymään toisiinsa, ja kiinteällä mutterilla estetään ruuvin ja mutterin pyöriminen toisiinsa nähden, jolloin ruuvi voi liikkua aksiaalisesti. Yleisesti ottaen tämä muutos voidaan toteuttaa kahdella tavalla.
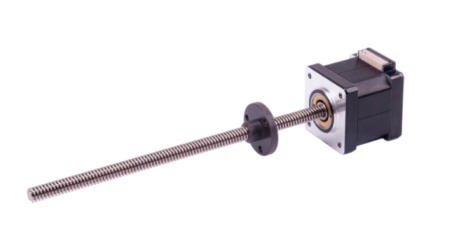
Ensimmäinen on rakentaa moottoriin sisäkierteillä varustettu roottori ja toteuttaalineaarinen liikekytkemällä roottorin ja ruuvin sisäkierteet toisiinsa, jota kutsutaan lävistäväksi ruuviaskelmoottoriksi. (Mutteri on integroitu moottorin roottoriin ja ruuvin akseli kulkee moottorin roottorin keskiosan läpi. Käytössä ruuvi on lukittava ja asetettava pyörimisenestolle. Kun moottori on käynnissä ja roottori pyörii, moottori liikkuu lineaarisesti ruuvia pitkin. (Jos moottori on lukittu ja ruuvi on asetettu pyörimisenestolle, ruuvi liikkuu lineaarisesti.)
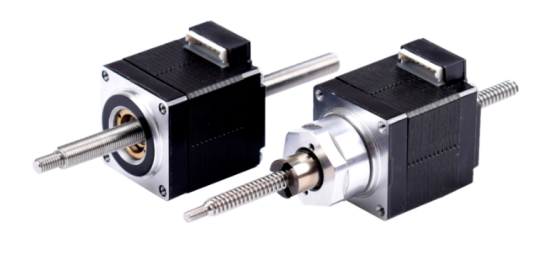
Läpiakselin tyyppi
Toinen on ottaaruuviKuten moottorin ulostuloakseli, moottorissa ulkoisen käyttömutterin ja ruuvin välityksellä tapahtuvan kytkennän kautta lineaarisen liikkeen toteuttamiseksi, tämä on ulkoisen käyttötyypin ruuviaskelmoottori. Tuloksena on huomattavasti yksinkertaistettu rakenne, joka mahdollistaa tarkan lineaarisen liikkeen suorittamisen monissa sovelluksissa suoraan ruuviaskelmoottorilla ilman ulkoisen mekaanisen vivuston asentamista. (Mutteri on moottorin ulkopuolella ja kytketty käyttömekanismiin. Kun moottori pyörii, mutteri liikkuu lineaarisesti ruuvia pitkin.)
Ulkoisen aseman tyyppi
Läpiakselisen lineaarisen askelmoottorin sovellusedut:
Verrataan sovellusskenaarioita, joissa ulkoisesti ohjattuja lineaarimoottoreita käytetään yhdessälineaarijohteetLäpiakselisilla lineaarisilla askelmoottoreilla on omat ainutlaatuiset etunsa, jotka heijastuvat pääasiassa seuraavissa kolmessa näkökohdassa:
1.Mahdollistaa suuremman järjestelmäasennusvirheen:
Yleisesti ottaen, jos käytetään ulkoisesti ohjattua lineaariaskelmoottoria, ruuvin ja johdekiskon kiinnityksen välinen huono yhdensuuntaisuus johtaa todennäköisesti järjestelmän jumiutumiseen. Läpiakselilla toimivilla lineaariaskelmoottoreilla tätä kohtalokasta ongelmaa voidaan kuitenkin parantaa huomattavasti rakenteen rakenteellisten ominaisuuksien ansiosta, jotka mahdollistavat suuremman järjestelmävirheen.
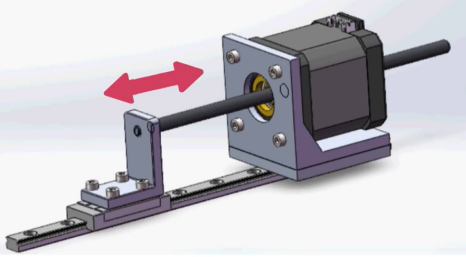
Kun moottoriin syötetään virtaa, mutteri pyörii roottorin mukana ja ruuvi on kytketty ulkoiseen kuormaan ja liikkuu suorassa linjassa ohjainta pitkin.
2.Ruuvin kriittinen nopeus ei rajoita:
Kun ulkoisesti ohjattuja lineaarimoottoreita valitaan suurnopeuksiseen lineaariliikkeeseen, niitä rajoittaa yleensä ruuvin kriittinen nopeus. Läpiakselisessa lineaarimoottorissa ruuvi on kuitenkin kiinteä ja pyörimätön, jolloin moottori voi käyttää lineaarijohteen liukusäädintä. Koska ruuvi on paikallaan, ruuvin kriittinen nopeus ei rajoita sitä suurta nopeutta toteutettaessa.
3.Tämä säästää asennustilaa:
Läpiakselinen lineaariaskelmoottori ei vie ruuvin pituutta pidempään tilaa moottoriin integroidun mutterin ansiosta. Samaan ruuviin voidaan asentaa useita moottoreita. Moottorit eivät voi "kulkea" toistensa läpi, mutta niiden liikkeet ovat toisistaan riippumattomia. Siksi se on sopiva valinta sovelluksiin, joissa on tiukemmat tilavaatimukset.
Lisätietoja saat ottamalla meihin yhteyttä osoitteessaamanda@kgg-robot.comtai+WA0086 15221578410.
Julkaisun aika: 11. helmikuuta 2025




